소개
1960년대 후반과 1970년대 초반 이후, 대부분의 전통적인 항공 사진 촬영 시스템은 항공기 및 우주항공용 전자광학 및 전자 센서 시스템으로 대체되었습니다. 전통적인 항공 사진 촬영은 주로 가시광선 영역에서 이루어지지만, 현대의 항공 및 지상 기반 원격 감지 시스템은 가시광선, 반사 적외선, 열적외선 및 마이크로파 스펙트럼 영역을 포괄하는 디지털 데이터를 생성합니다. 항공 사진에서 전통적인 시각적 해석 방법은 여전히 유용합니다. 그러나 원격 감지는 목표물의 특성에 대한 이론적 모델링, 물체의 스펙트럼 측정, 정보 추출을 위한 디지털 이미지 분석과 같은 추가적인 활동을 포함하여 더 넓은 범위의 응용 분야를 포괄합니다.
원격 감지는 비접촉 장거리 탐지 기술의 모든 측면을 지칭하며, 전자기력을 이용하여 목표물의 특성을 탐지, 기록 및 측정하는 방법입니다. 이 개념은 1950년대에 처음 정의되었습니다. 원격 감지 및 지도 제작 분야는 능동 감지와 수동 감지의 두 가지 방식으로 나뉘는데, 그중 라이다(Lidar) 감지는 능동 감지 방식으로, 자체 에너지를 이용하여 목표물에 빛을 방출하고 반사된 빛을 감지합니다.
능동형 라이다 감지 및 응용
라이다(LiDAR, Light Detection and Ranging)는 레이저 신호를 송수신하는 데 걸리는 시간을 기반으로 거리를 측정하는 기술입니다. 항공 라이다라는 용어는 항공 레이저 스캐닝, 매핑 또는 라이다와 같은 의미로 사용되기도 합니다.
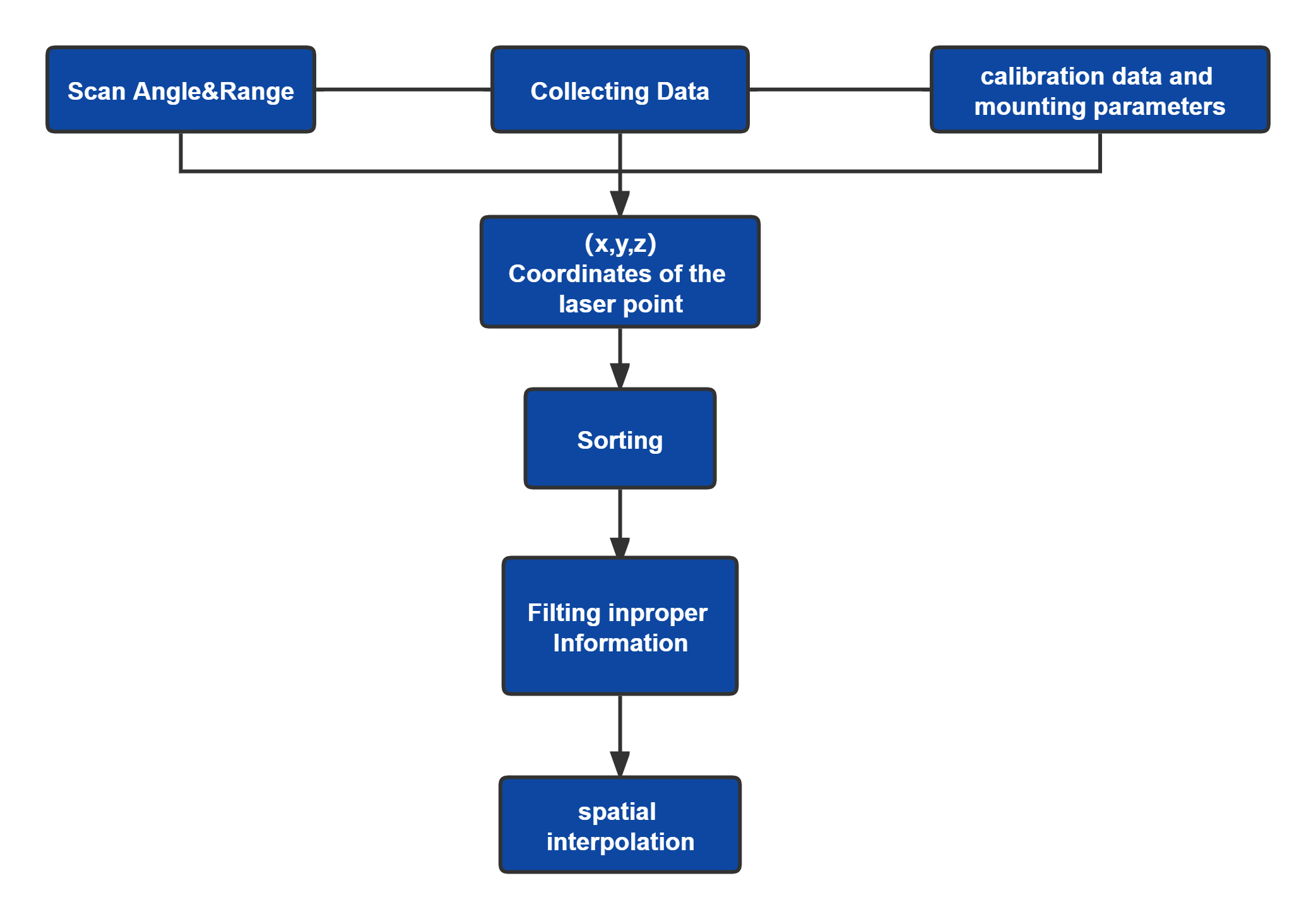
이 그림은 LiDAR 사용 시 점 데이터 처리의 주요 단계를 보여주는 일반적인 흐름도입니다. (x, y, z) 좌표를 수집한 후, 이러한 점들을 정렬하면 데이터 렌더링 및 처리 효율을 향상시킬 수 있습니다. LiDAR 점의 기하학적 처리 외에도 LiDAR 피드백에서 얻은 강도 정보 또한 유용하게 활용될 수 있습니다.
모든 원격 감지 및 지도 제작 응용 분야에서 LiDAR는 햇빛 및 기타 기상 조건의 영향을 받지 않고 더욱 정확한 측정값을 얻을 수 있다는 뚜렷한 장점을 가지고 있습니다. 일반적인 원격 감지 시스템은 레이저 거리 측정기와 위치 측정 센서의 두 부분으로 구성되며, 이미징 과정이 없기 때문에 기하학적 왜곡 없이 3차원 지형 환경을 직접 측정할 수 있습니다 (3차원 세계를 2차원 평면에 투영).
저희 LiDAR 소스 중 일부
눈에 안전한 LiDAR 센서용 레이저 광원 선택


