대기 탐지 방법
대기 탐지의 주요 방법으로는 마이크로파 레이더 탐사, 항공기 또는 로켓 탐사, 관측 기구, 위성 원격 탐사, 그리고 라이다(LIDAR)가 있습니다. 마이크로파 레이더는 대기로 방출되는 마이크로파가 밀리미터파 또는 센티미터파로 파장이 길어 미세 입자, 특히 다양한 분자와 상호작용할 수 없기 때문에 미세 입자를 탐지할 수 없습니다.
항공기 및 로켓을 이용한 대기 관측 방법은 비용이 많이 들고 장기간 관측이 어렵습니다. 관측 기구를 이용한 방법은 비용은 저렴하지만 풍속의 영향을 더 많이 받습니다. 위성 원격 탐사는 탑재된 레이더를 사용하여 전 세계 대기를 광범위하게 관측할 수 있지만 공간 해상도가 상대적으로 낮습니다. 라이다는 대기에 레이저 빔을 발사하고 대기 분자 또는 에어로졸과 레이저 사이의 상호작용(산란 및 흡수)을 이용하여 대기 매개변수를 도출하는 데 사용됩니다.
레이저의 강한 방향성, 짧은 파장(마이크론 파장), 좁은 펄스 폭, 그리고 광검출기(광증폭관, 단일 광자 검출기)의 높은 감도 덕분에 라이다는 대기 매개변수를 높은 정밀도와 높은 공간 및 시간 해상도로 검출할 수 있습니다. 이러한 높은 정확도, 높은 공간 및 시간 해상도, 그리고 지속적인 모니터링 가능성 덕분에 라이다는 대기 에어로졸, 구름, 대기 오염 물질, 대기 온도 및 풍속 검출 분야에서 빠르게 발전하고 있습니다.
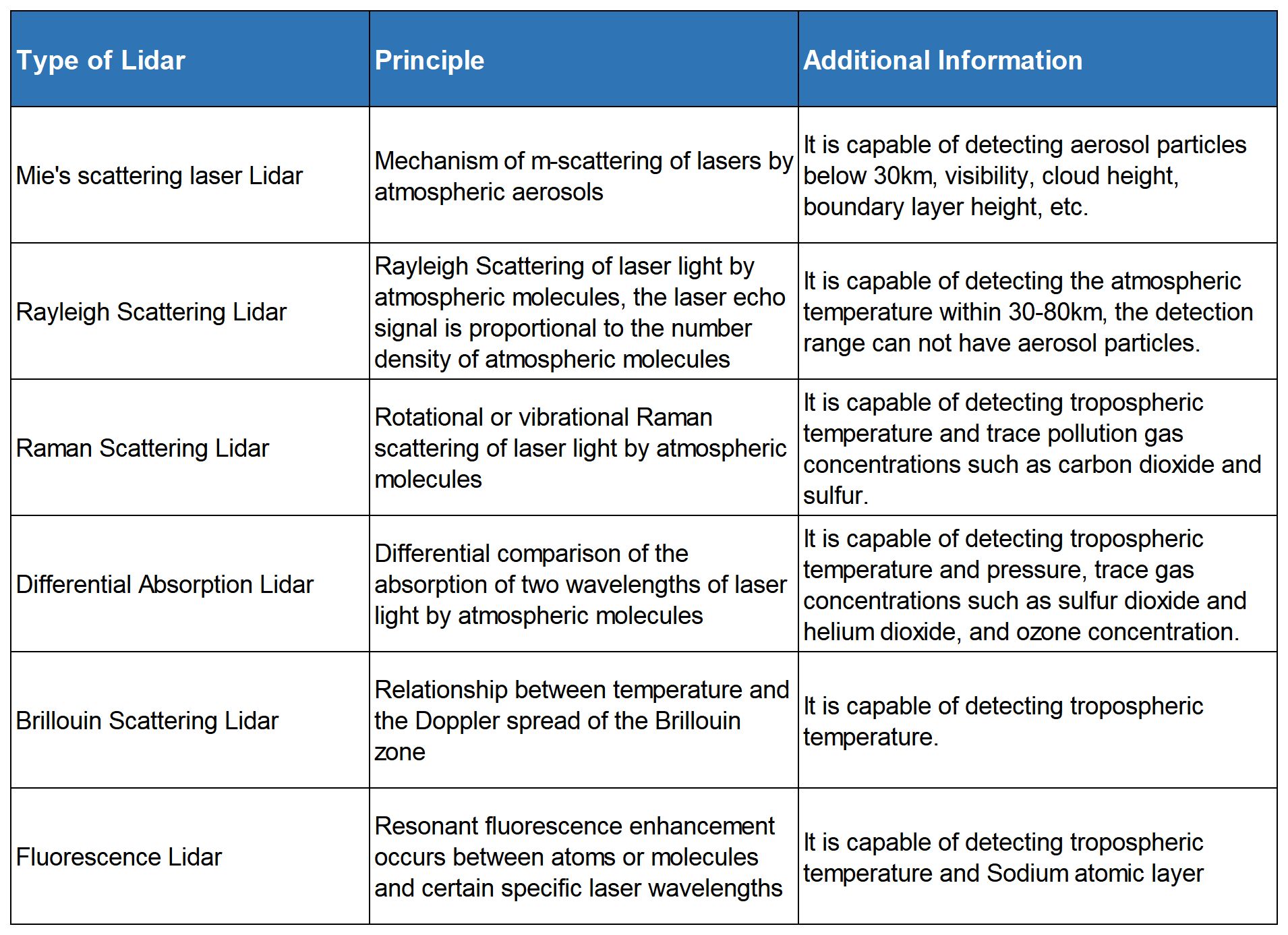
다음 표는 라이다의 종류를 보여줍니다.
대기 탐지 방법
대기 탐지의 주요 방법으로는 마이크로파 레이더 탐사, 항공기 또는 로켓 탐사, 관측 기구, 위성 원격 탐사, 그리고 라이다(LIDAR)가 있습니다. 마이크로파 레이더는 대기로 방출되는 마이크로파가 밀리미터파 또는 센티미터파로 파장이 길어 미세 입자, 특히 다양한 분자와 상호작용할 수 없기 때문에 미세 입자를 탐지할 수 없습니다.
항공기 및 로켓을 이용한 대기 관측 방법은 비용이 많이 들고 장기간 관측이 어렵습니다. 관측 기구를 이용한 방법은 비용은 저렴하지만 풍속의 영향을 더 많이 받습니다. 위성 원격 탐사는 탑재된 레이더를 사용하여 전 세계 대기를 광범위하게 관측할 수 있지만 공간 해상도가 상대적으로 낮습니다. 라이다는 대기에 레이저 빔을 발사하고 대기 분자 또는 에어로졸과 레이저 사이의 상호작용(산란 및 흡수)을 이용하여 대기 매개변수를 도출하는 데 사용됩니다.
레이저의 강한 방향성, 짧은 파장(마이크론 파장), 좁은 펄스 폭, 그리고 광검출기(광증폭관, 단일 광자 검출기)의 높은 감도 덕분에 라이다는 대기 매개변수를 높은 정밀도와 높은 공간 및 시간 해상도로 검출할 수 있습니다. 이러한 높은 정확도, 높은 공간 및 시간 해상도, 그리고 지속적인 모니터링 가능성 덕분에 라이다는 대기 에어로졸, 구름, 대기 오염 물질, 대기 온도 및 풍속 검출 분야에서 빠르게 발전하고 있습니다.
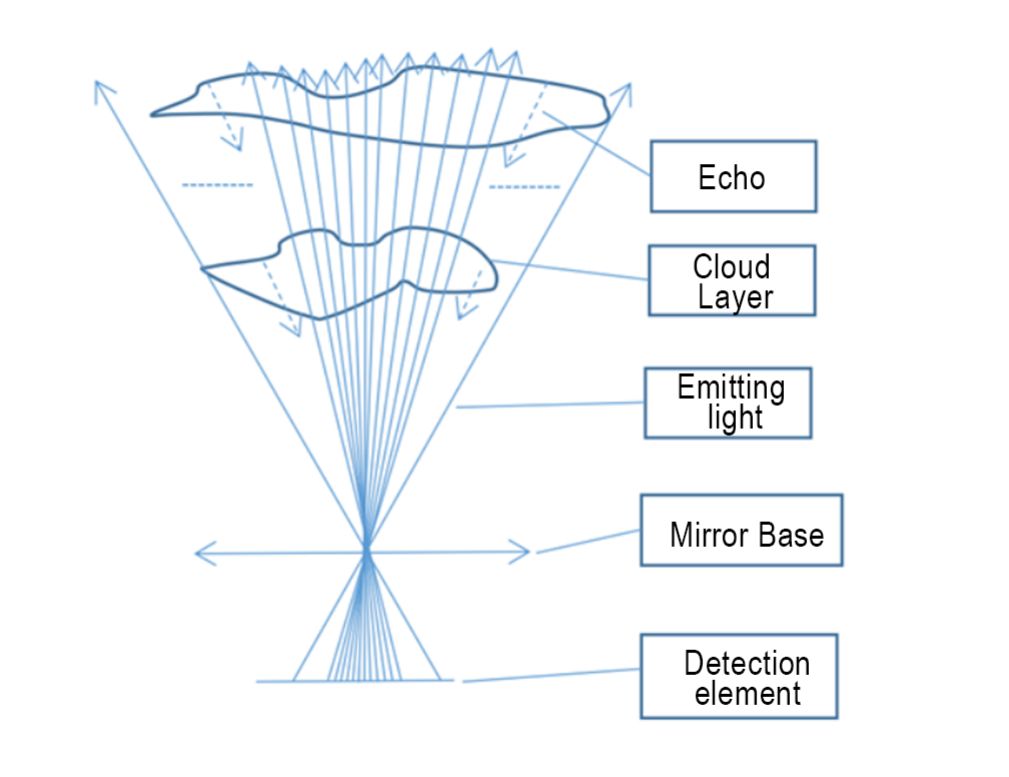
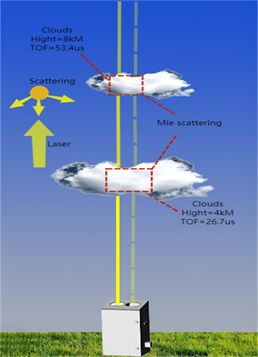
구름 측정 레이더의 원리 개략도
구름층: 공중에 떠 있는 구름층; 방출광: 특정 파장의 평행광선; 반향: 방출된 빛이 구름층을 통과한 후 산란되어 발생하는 신호; 거울면: 망원경 시스템의 등가 표면; 검출 소자: 약한 반향 신호를 수신하는 데 사용되는 광전 소자.
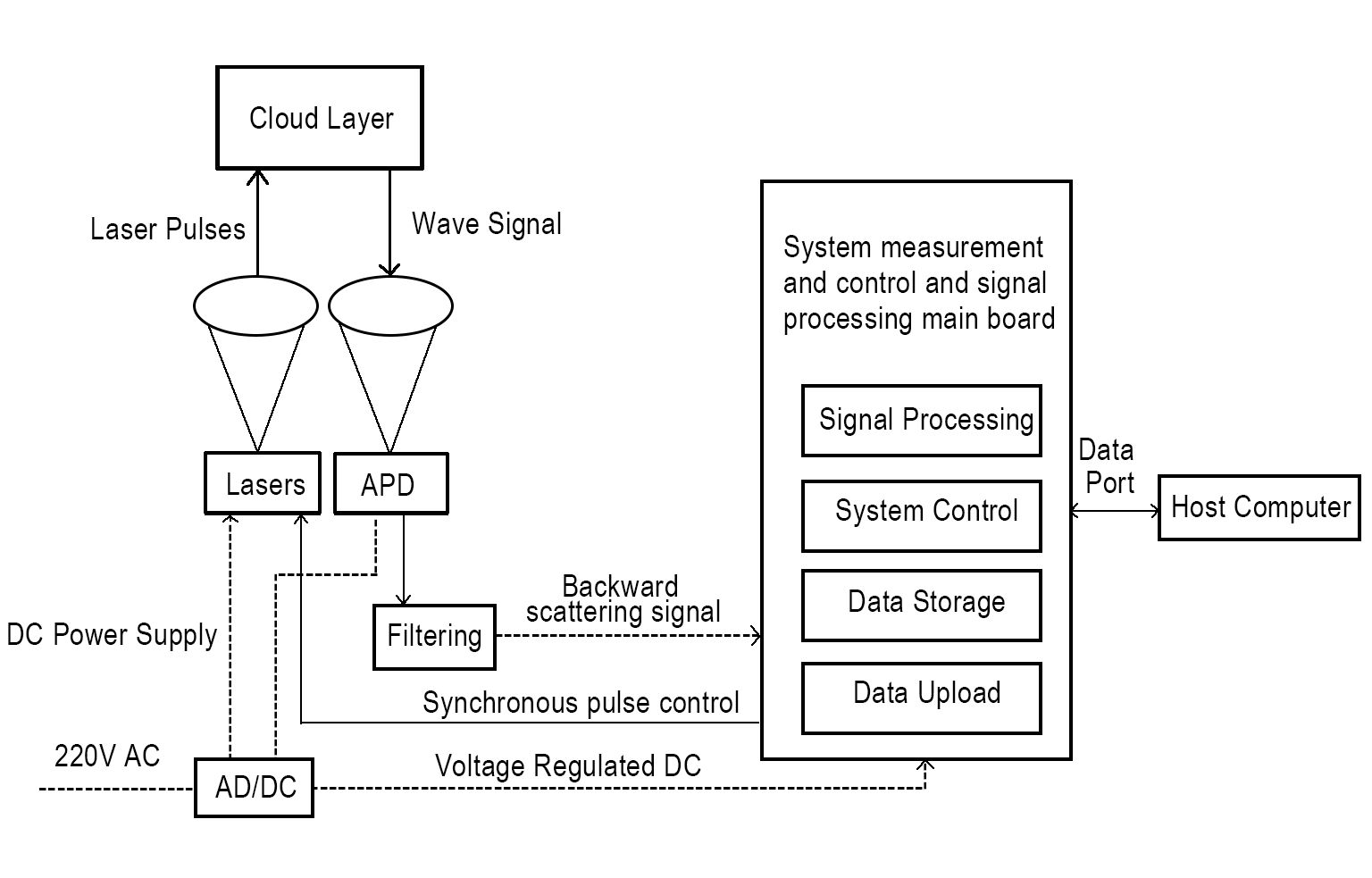
구름 측정 레이더 시스템의 작동 프레임워크
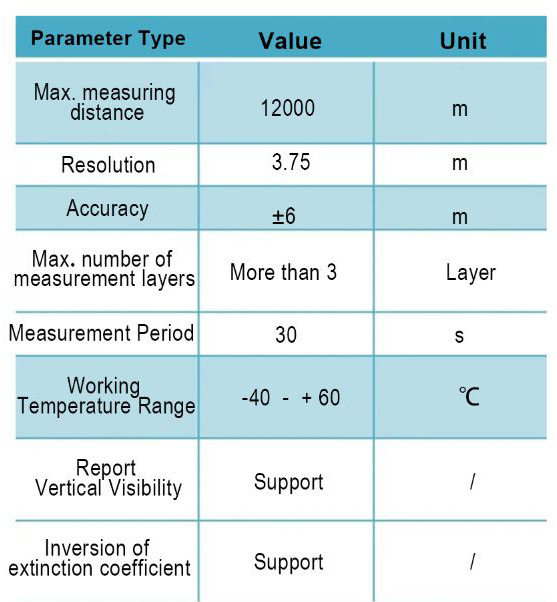
루미스팟 테크의 클라우드 측정 라이다 주요 기술 매개변수
제품 이미지

애플리케이션

제품 작동 상태도
게시 시간: 2023년 5월 9일